
Cuando se escalan hacia abajo los robots a escala micrométrica, para pequeñas tareas como la incisión de tejidos y la punción de venas de la retina, el minimalismo es clave.
Para hacer microrobots más pequeños y simples, investigadores de la Universidad Drexel (Filadelfia, EE.UU.) han desarrollado un método de fabricación que utiliza los requisitos geométricos mínimos para el movimiento de fluidos, y que consta de sólo dos micropartículas siamesas recubiertas con trozos de residuos magnéticos: óxido de hierro.
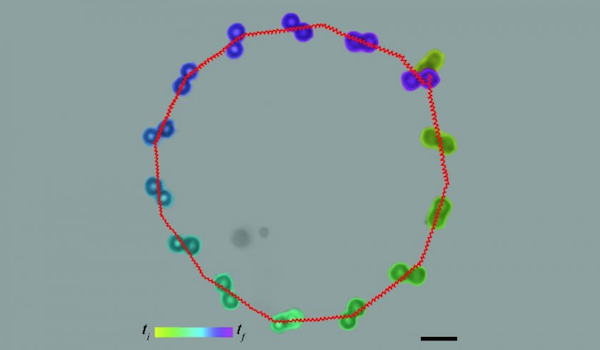
Cuando un microrobot está expuesto a un campo magnético externo -la fuente de alimentación, dada la dificultad para contraer las baterías hasta el tamaño de las bacterias- comienza a girar y moverse de una manera similar a los flagelos bacterianos, gracias a los restos de óxido de hierro.
Según MinJun Kim, profesor del Departamento de Mecánica e Ingeniería Mecánica de la universidad, “el uso de partículas para crear estos micronadadores combina bien con otras tecnologías basadas en micro y nanopartículas, como los sistemas de administración de fármacos por nanopartículas.”
Kim y sus colegas discuten su trabajo esta semana en Applied Physics Letters, de la AIP Publishing (la editora del American Institute of Physics). El trabajo previo de los investigadores había incluido un artículo sobre los requisitos geométricos mínimos para fabricar micronadadores que operan a bajos números de Reynolds, una relación de fuerzas que determina el grado de turbulencia de los fluidos y de los objetos en condiciones de flujo.
A bajos números de Reynolds, dice Kim en la nota de prensa de la AIP, recogida por AlphaGalileo, las fuerzas de inercia se vuelven insignificantes, y las fuerzas viscosas se vuelven dominantes. Esto descarta el movimiento recíproco -la forma en que un pez utiliza sus aletas, por ejemplo-, por lo que los micronadadores deben confiar en el movimiento no recíproco, similar al de los flagelos bacterianos, en el que el movimiento de rotación se convierte en movimiento de traslación.
Fabricación
Los investigadores fabricaron sus micronadadores basados en partículas mediante conjugación química y auto-ensamblaje magnético. Para enlazar las piezas magnéticas de cuatro micras en parejas, Kim y sus colegas prepararon dos lotes revestidos por separado con las proteínas avidina y biotina, que crean uno de los enlaces no covalentes más fuertes que se encuentran de forma natural.
Luego expusieron estos pares unidos a virutas de óxido de hierro de una micra, que se adhirieron magnéticamente.
Esto contrasta con muchos métodos existentes de fabricación en los que los microrobots se fabrican utilizando métodos de química y litografía especializados, algunos de los cuales implican moldes y materiales elastoméricos.
Luego, los investigadores colocaron muestras de los micronadadores dentro de una cámara sencilla fabricada a partir de PDMS, un polímero orgánico común a base de silicio. A continuación, la cámara se colocó dentro de un sistema de bobina electromagnética que se montó sobre un microscopio con controles externos para manipular la fuerza, la frecuencia de rotación y la dirección del campo magnético. Esto permitió controlar el movimiento, la velocidad y el rumbo del nado de los micronadadores.
El trabajo futuro para el laboratorio de Kim -que recientemente se ha mudado a la Universidad Metodista del Sur, en Dallas (Texas)- estudiará la gama de aplicaciones de los robots.
Fuente: tendencias21.net