
Los robots tienen muchas habilidades, pero la delicadeza no ha sido tradicionalmente una de ellas. Extremidades y dedos rígidos les dificultan agarrar, sostener y manipular una amplia serie de objetos cotidianos sin que se les caigan o los aplasten.
Recientemente, el equipo de Bianca Homberg, Daniela Rus, Robert Katzschmann y Mehmet Dogar, del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL), adscrito al Instituto Tecnológico de Massachusetts (MIT), en Estados Unidos, ha descubierto que la solución podría ser recurrir, aunque de manera imaginativa, a un material muy común, la silicona.
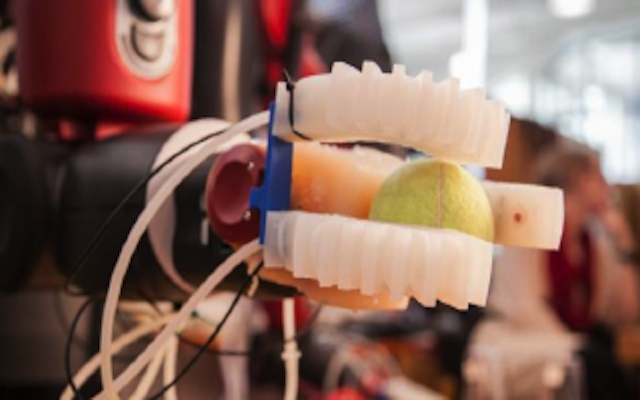
Estos expertos han demostrado una mano robótica, impresa en 3D y hecha de goma de silicona, que puede levantar y manipular objetos tan delicados como un huevo y tan delgados como un disco compacto. La mano o pinza puede también agarrar artículos como una pelota de tenis, un cubo de Rubik y un muñeco de trapo o peluche.
De una manera igualmente notable, sus tres dedos tienen sensores especiales que pueden estimar el tamaño y la forma de un objeto con suficiente precisión como para identificarlo de entre muchos otros artículos. Estos sensores se basan en algoritmos avanzados de identificación de objetos.
Los robots blandos tienen diversas ventajas sobre los robots duros, incluyendo la capacidad de agarrar objetos con formas irregulares, deslizarse por espacios ajustados (como hacen los pulpos), y soportar bien las colisiones.