
Las innovaciones en el mundo de la robótica se suceden de manera frenética. Tres de los retos que más fascinan en la actualidad a la comunidad científica son conseguir que las máquinas actúen cada vez más autónomamente, ejerzan múltiples tareas y se adapten a ambientes diferentes. Un grupo de investigadores estadounidenses ha desarrollado por primera vez un prototipo de robot capaz de las tres cosas al mismo tiempo. Este modelo puede cumplir acciones en un entorno desconocido, por ejemplo, identificar un objeto, recogerlo y llevarlo a una zona designada o subir unas escaleras para depositar un sobre en una caja, tras configurar su arquitectura según el objetivo que se le ha pedido y los obstáculos que se encuentra. Así lo demuestran tres experimentos descritos en un estudio publicado este miércoles en Science Robotics.
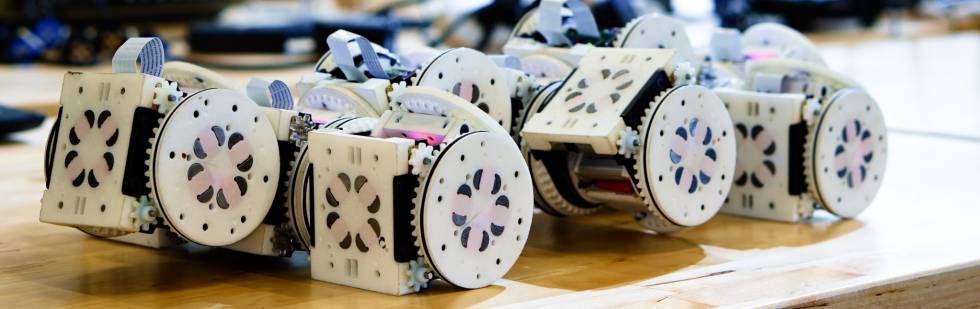
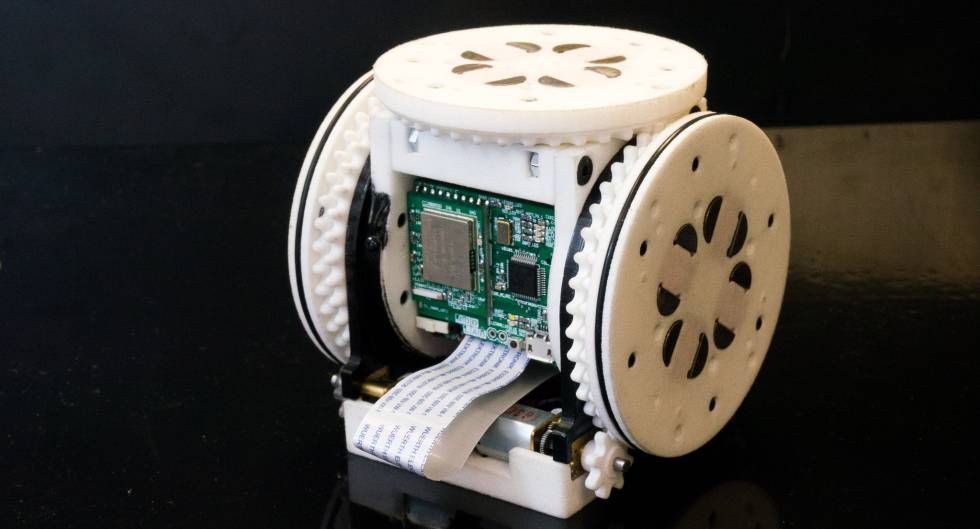
Daudelin asegura que, gracias a esa capacidad, los robots modulares “tienen el potencial de adaptarse a lo que perciben en su entorno”. El investigador añade que eso “funciona muy bien para sistemas autónomos en ambientes desconocidos”, añade. Estas consideraciones han llevado a él y a sus compañeros a diseñar un sistema central inteligente que integra algoritmos y sensores capaces de gobernar la acción de unos módulos robóticos cúbicos y modificarla según cambie la percepción de lo que lo rodea, explica Daudelin. El resultado es el primer prototipo que puede reconfigurar su forma, por ejemplo, pasar de vehículo de exploración a máquina recolectora de objetos, y adaptarse a distintas tareas sin control humano.
Tres pruebas
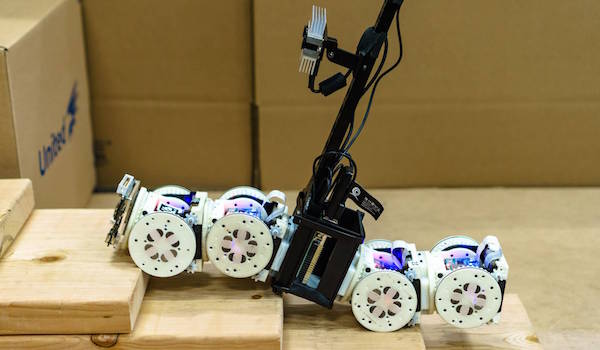
En el artículo publicado este miércoles, los autores describen tres pruebas. En la primera, el robot tenía asignada la tarea de encontrar dos pequeños objetos, uno de color rosa y uno verde, colocados en una habitación entre distintos obstáculos. El objetivo final era recogerlos y llevarlos a una zona marcada en azul, ubicada en otro punto del cuarto. En el segundo, tenía que depositar otro objeto en una caja colocada encima de unas escaleras. El tercer experimento preveía que el robot colocara una pegatina en un punto de una caja marcado en rosa.
Para conseguir estos objetivos, la máquina debía explorar el entorno con sus cámaras y sensores, diseñar un mapa 3D de ese ambiente y decidir cómo configurar los módulos, cada uno dotado de elementos como ruedas e imanes, de la forma más eficaz para solucionar la misión designada. Los módulos pueden desconectarse del eje central del robot y moverse libremente según le indique el sistema inteligente instalado en él a través de una conexión wi-fi. La acción de reconfiguración de un módulo tardó en completarse alrededor de un minuto, aseguran los autores de los experimentos. En anteriores pruebas realizadas en otros estudios, podía tardar entre cinco y 15 minutos, contrastan.
“El algoritmo se basa en una “biblioteca” de comportamientos y posibles conformaciones del robot”, explica Daudelin. “Cada registro representa una acción, como moverse o agarrar un objeto, correspondiente con la forma requerida y las condiciones del entorno necesarias para ejecutar esa acción”, detalla.
Una misión difícil
Lograr que los robots modulares sean autónomos es un objetivo de gran complejidad, aseguran los autores. “Una gran diferencia con respecto a robots de una sola forma es que hay múltiples elementos robóticos, en nuestro caso muchos, independientes uno del otro”, explica Daudelin. “Por eso hay muchas más posibilidades de error. Si un elemento falla, puede que se descoloque todo el sistema”, asegura. Tosun recuerda que el algoritmo que regula la máquina tiene que elegir “no solo qué va a hacer, sino también qué forma va a asumir para completar su tarea”.
El ingeniero cuenta que, durante las pruebas, notaron muchas situaciones en las que el robot “no hacía exactamente lo que estaba previsto” y que algunas acciones necesitaban en su planificación “mucha más fortaleza ante la posibilidad de fallar” que otras, porque se ponían en práctica con más frecuencia. Por todas esas razones, Daudelin cree que aún faltan años de investigación antes de que un robot con esas características sea disponible en el mercado. “Se necesitan muchas mejoras en la tecnología para aumentar la solidez y las habilidades de reconfiguración de los robots modulares”, considera.
Pese a las dificultades, los creadores del nuevo prototipo aseguran que los robots modulares autónomos podrían ser útiles en sectores como las operaciones de búsqueda y rescate o en acciones militares. “En estas aplicaciones, el robot podría encontrarse una variedad de terrenos distintos y otros entornos desconocidos que requieren la transformación de su forma para adaptarse”, afirma Dudelain. En misiones militares, agrega, se puede sumar el inconveniente de que los explosivos dañen partes de una máquina. “Un robot modular puede tener una ventaja, porque solo se necesitaría cambiar los módulos dañados y no la estructura entera”, explica. Su compañero Tarik Tosun asegura que también podrían ayudar en tareas domésticas diarias.
Fuente: El Pais