
Seguramente habrás notado que en la naturaleza existen especies verdaderamente asombrosas, y una de ellas son las hormigas, pues estudios han demostrado que son capaces de cargar objetos que superan hasta 50 veces su peso corporal. Ahora, con los recientes avances en robótica, un grupo de investigadores publicó el pasado 24 de Octubre en Science Robotics uno de los logros más prometedores de la robótica miniatura.
La estrella principal: un nuevo tipo de mini dron que puede atraer mucho más que su propio peso.
Pero este dron trabaja de una manera peculiar. Según informan los investigadores, el dron se engancha a una superficie y usa un cable para enrollar objetos hasta 40 veces su masa. Esta hazaña es una mejora notable con respecto a otros robots voladores, que generalmente no pueden cargar objetos más pesados que su propio peso. Este dron podría funcionar en fábricas o ayudar con misiones de exploración y búsqueda y rescate.
Cada Quadcopter de 100 gramos está equipado con adhesivo inspirado en microespinas, que se asemejan a pequeños anzuelos, que lo ayudan a adherirse a varias superficies. Después de conectar un cable a un objeto, el dron vuela a su destino, se ancla a su lugar de aterrizaje y usa un cabrestante mecánico para jalar su carga. Esta secuencia de eventos permite al drone transportar objetos que serían demasiado pesados para transportarlos mientras se vuela.
El ingeniero mecánico Matthew Estrada de la Universidad de Stanford y sus colegas volaron uno de sus aviones no tripulados hasta un edificio parcialmente derrumbado, donde el robot se colocó sobre un voladizo de hormigón y levantó una carga útil de 200 gramos, incluida una cámara del suelo para observar las ruinas.
Otro par de drones se unieron para abrir una puerta pesada. Un robot enganchó un lazo alrededor de la manija de la puerta, se pegó a la puerta y tiró de la manija hacia abajo. El otro dron metió un gancho de resorte debajo de la puerta, mordió la alfombra con su hilera de dientes microspinos y abrió la puerta.

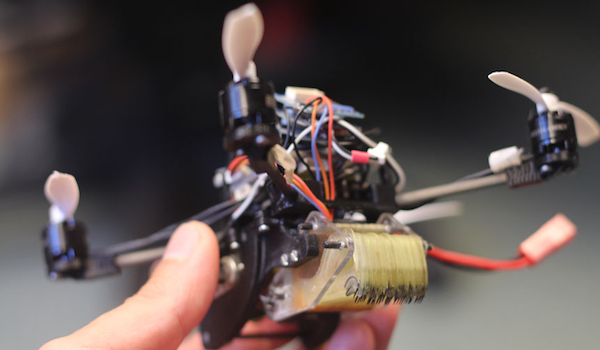
Fig. 1 El sistema FlyCroTug. (A) La operación multimodal de FlyCroTugs les permite combinar tamaño pequeño, alta movilidad en entornos desordenados y desestructurados, y manipulación enérgica. Varios sistemas robóticos demuestran subconjuntos de estos atributos [por ejemplo, MAVs ( 1 ), Salto ( 34 ), ANYmal ( 3 ), BigDog ( 35 ) y μTug ( 5 )]. (B) Un FlyCroTug con microspines para anclaje y un cabrestante para tirar cargas que pesan 100g. y una distancia del rotor de 7,3 cm desde el centro. ( C) Proceso de operación: cada robot (1) vuela a un objeto y conecta un efector final especializado, (2) vuela a cierta distancia mientras reparte un cable, (3) aterriza y se ancla a una superficie con adhesivos o microespinas, y (4) tira del cable con un cabrestante. La locomoción con ruedas se puede agregar en los pasos (1) y (3) para un posicionamiento más preciso. La secuencia se repite según sea necesario.
En el futuro, los equipos de aviones no tripulados de carga pesada podrían ayudar a acumular inventario en almacenes, girar válvulas en fábricas o limpiar escombros en zonas de desastre.
Fuente: Cerebro Digital